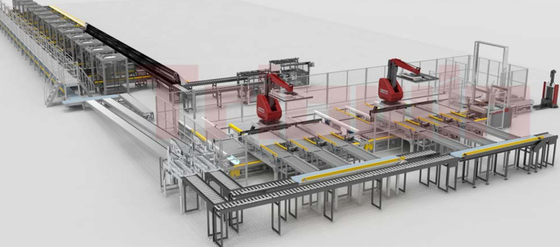
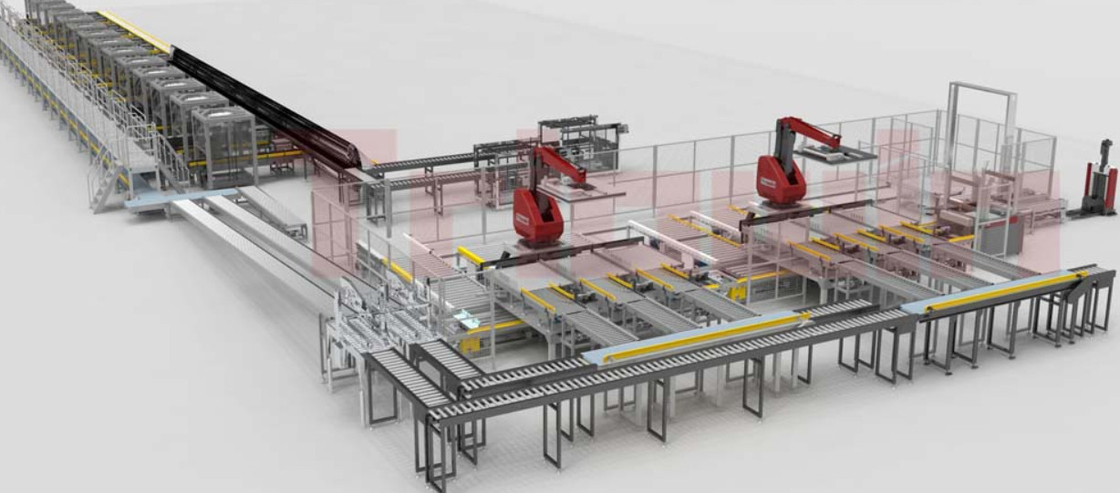
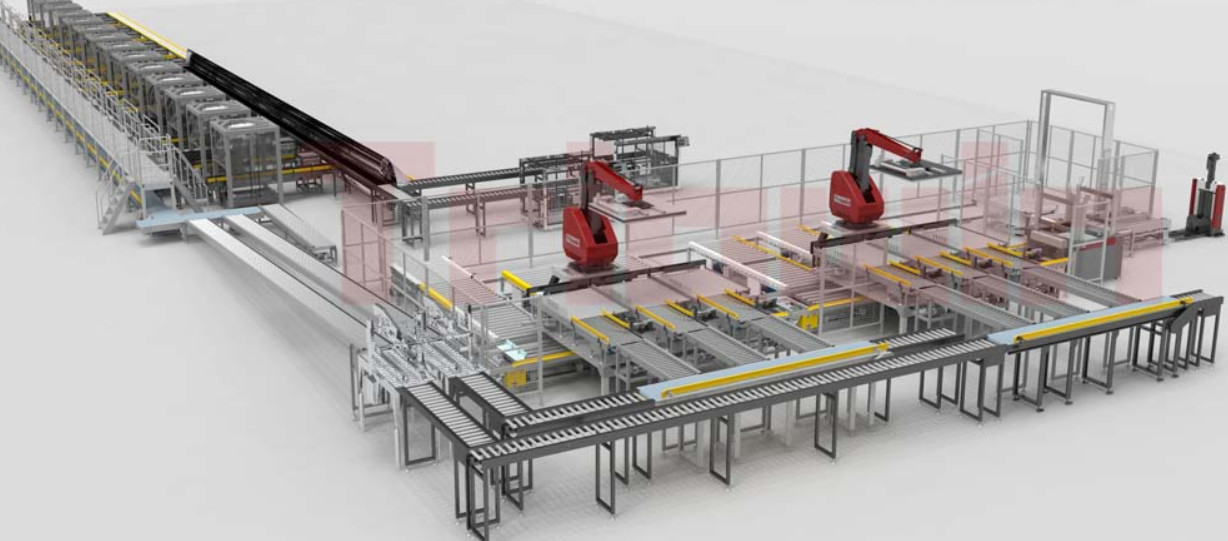
Produktbeschreibung
Der einzigartige lineare Aktor des Roboters, energiesparendes Armdesign, einfache Bedienungsschnittstellenentwicklung, für Kunden verschiedener Produktionslinien,Materialien für professionelle Roboterlösungen, seine hervorragende Genauigkeit und Schnelligkeit, hohe Effizienz und Stabilität der Leistung, um einem Roboter zu ermöglichen, mehrere Produktionslinien gleichzeitig zu vervollständigen,Roboterlastkapazität von 120-300 kg, gilt für Futtermittel, Chemikalien, Getreide und Öl, Lebensmittel, Baustoffe, Alltagschemikalien, Alkohol, Getränke, Pharmazeutika, Haushaltsgeräte, 3C-Elektronik und andere Industriezweige.
Produktvorteil
1 einzigartiger linearer Aktor: ein geniales Vier-Takt-Mechanismus, so daß die Steuerung des Manipulators einfacher und genauer erfolgt.
2 Energieeinsparende Umweltschutz-Roboterarm-Design: Hochfestigkeit Aluminiumlegierung Produktion, nicht nur macht die Armbewegung flexibler, sondern reduziert auch den Energieverbrauch.
3 Einfacher Unterrichtsbetrieb und freundliche grafische Bedienoberfläche: die Lehrposition ist gering, die Bedienoberfläche ist einfach,Dies erleichtert das Debugging vor Ort und verbessert die Effizienz vor Ort erheblich..
4 Echtzeitüberwachung vor Ort: Hochpräzisions-Aktionssimulationssoftware vor Ort, mit der aus der Ferne erkannt werden kann, ob das Programm vor Ort normal funktioniert.automatische Störüberwachung verhindert Störungskollisionen.
5 Simulation vor dem Layout: Mit Hilfe einer leistungsstarken 3D-Simulations-/Programmiersoftware kann es leicht in der Büro-Roboter-Programmierung, Layout, Interferenzüberwachung,Feldaktionssimulation und andere Arbeiten werden einfach und effektiv, wodurch die Felddebugging-Zeit erheblich verkürzt und die Gesamtproduktionseffizienz verbessert wird.
Flexible Programmierung:
1 Manuelle Unterrichtsmethode: die intuitivste Art, die Reproduktion zu lehren, und dann kann die komplexe Form des Stapelns leicht reproduziert werden.
2 Offline-Programmiermodus: Die Programmierung und Prozesserkennung kann im Offline-Zustand abgeschlossen werden, und Roboterprogramme können im Voraus vorbereitet werden, um die Effizienz der Feldarbeit zu verbessern.
3 Graphische Programmierung: Die Palettierungsdaten können durch Eingabe verschiedener Palettierungsdatenparameter über eine berührungsbasierte Mensch-Maschine-Schnittstelle erzeugt werden.


 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!